新支持的profile : SAP(SIM access profile)
另外原有的profile也有改变:
同时保持连接两台A2DP Sink 设备 (目前默认仍然只能同时连接一台设备,可以通过修改 persist.bt.max.a2dp.connections 为 2 来支持这个特性)
同时保持连接两台AVRCP controllers设备
虽然是连接两台设备,但同时只能有一台设备收听音乐,收听音乐的设备可以在这两台已连接设备之间切换 (可以通过修改 persist.bt.enable.multicast 为 1 来支持)
BT enable 变化
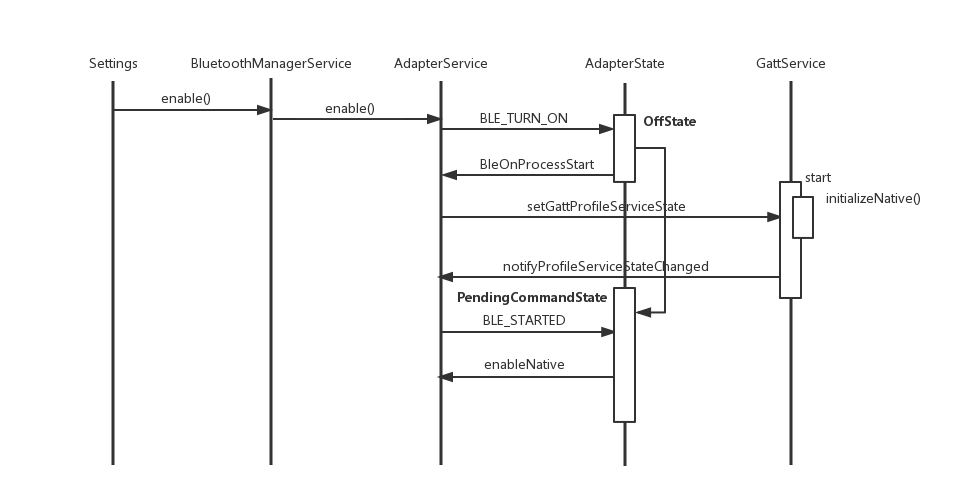
在之前是直接调用 enableNative() , 现在会首先 enable BLE gatt service . 其中 initializeNative() 中会去获取 bluedroid 中 gatt 的接口,并调用其 init ,init 仅仅是传递上层的 callback
bluedroid 中的流程也有一些改变 :
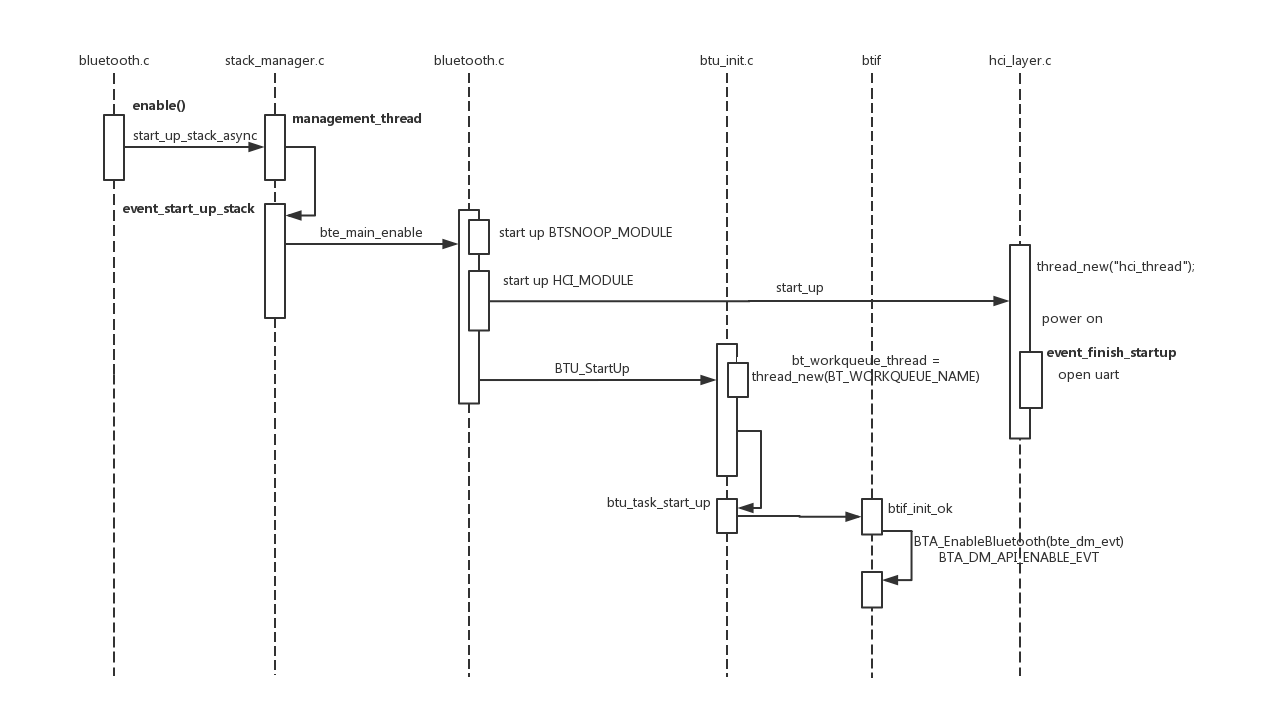
另外 Android M bluedroid 中的各模块之间的消息处理机制也和之前不一样
创建线程主要通过 thread_new , 参数为 线程的 name :
static const size_t DEFAULT_WORK_QUEUE_CAPACITY = 128;
static const char *BT_WORKQUEUE_NAME = "bt_workqueue";
thread_t *bt_workqueue_thread = thread_new(BT_WORKQUEUE_NAME);
thread_t *thread_new(const char *name) {
return thread_new_sized(name, DEFAULT_WORK_QUEUE_CAPACITY);
}
最后返回的是一个 thread_t 指针, bluedroid 中的工作线程都是由该结构体来表示 。先来看一下这个结构体
struct thread_t {
bool is_joined;
pthread_t pthread;
pid_t tid;
char name[THREAD_NAME_MAX + 1];
reactor_t *reactor;
fixed_queue_t *work_queue;
};
前4个成员变量比较好理解, 先来看一下 fixed_queue_t :
typedef struct fixed_queue_t {
list_t *list; //消息队列实体
semaphore_t *enqueue_sem; //用于判断该队列可写
semaphore_t *dequeue_sem; //用于通知队列可读
pthread_mutex_t lock;
size_t capacity;
reactor_object_t *dequeue_object;
fixed_queue_cb dequeue_ready;
void *dequeue_context;
} fixed_queue_t;
可以看到工作线程中都会包含一个消息队列 , 另外也还可以建立单独的消息队列并调用 fixed_queue_register_dequeue 来注册到相应的工作线程处理 。
先来看工作线程的建立 :
thread_t *thread_new_sized(const char *name, size_t work_queue_capacity) {
thread_t *ret = osi_calloc(sizeof(thread_t));
ret->reactor = reactor_new();
{ //reactor_new
reactor_t *ret = (reactor_t *)osi_calloc(sizeof(reactor_t));
// 创建 epoll 句柄, 最大监听 64 个fd,
ret->epoll_fd = epoll_create(MAX_EVENTS);
// 创建 eventfd , 主要用来做事件通知
ret->event_fd = eventfd(0, 0);
pthread_mutex_init(&ret->list_lock, NULL);
ret->invalidation_list = list_new(NULL);
struct epoll_event event;
memset(&event, 0, sizeof(event));
event.events = EPOLLIN;
event.data.ptr = NULL;
// 将 event_fd 加入监听, 监听事件为 EPOLLIN
epoll_ctl(ret->epoll_fd, EPOLL_CTL_ADD, ret->event_fd, &event);
}
ret->work_queue = fixed_queue_new(work_queue_capacity);
{ //fixed_queue_new
fixed_queue_t *ret = osi_calloc(sizeof(fixed_queue_t))
pthread_mutex_init(&ret->lock, NULL);
ret->capacity = capacity;
ret->list = list_new(NULL);
ret->enqueue_sem = semaphore_new(capacity);
ret->dequeue_sem = semaphore_new(0);
}
// Start is on the stack, but we use a semaphore, so it's safe
struct start_arg start;
strncpy(ret->name, name, THREAD_NAME_MAX);
start.thread = ret;
// 创建工作线程实体
pthread_create(&ret->pthread, NULL, run_thread, &start);
......
return ret;
error:
......
}
实际执行函数 run_thread 为 :
static void *run_thread(void *start_arg) {
thread_t *thread = start->thread;
//首先更改线程的名称
if (prctl(PR_SET_NAME, (unsigned long)thread->name) == -1) {
......
return NULL;
}
//保存 tid
thread->tid = gettid();
// 获取到 thread->work_queue 中的 dequeue_sem
int fd = fixed_queue_get_dequeue_fd(thread->work_queue);
void *context = thread->work_queue;
//监听工作线程中自带的消息队列 , ,其事件处理函数为 work_queue_read_cb
reactor_object_t *work_queue_object = reactor_register(thread->reactor, fd, context, work_queue_read_cb, NULL);
reactor_start(thread->reactor); //事件处理循环
{//reactor_start
if(reactor)
return run_reactor(reactor, 0); //0表示死循环
}
reactor_unregister(work_queue_object);
......
return NULL;
}
事件处理主要都是在 reactor_xxx 这几个函数中, 先来看 reactor_register ,其作用是将指定消息队列添加到工作线程中来监听和处理,并指定其event 处理函数, 其参数为
1.工作线程的 reactor ; 2. 代表消息队列可读的 fd 句柄 ; 3. 消息队列 ;4. event 写函数 ; 5. event 读函数
reactor_object_t *reactor_register(reactor_t *reactor,
int fd, void *context,
void (*read_ready)(void *context),
void (*write_ready)(void *context)) {
reactor_object_t *object =
(reactor_object_t *)osi_calloc(sizeof(reactor_object_t));
{ //epoll_wait 监听到的 event 的 data.ptr 指向该 object
struct reactor_object_t {
int fd; // 监听的表示可读写的句柄
void *context; // 传给 *_ready 读写函数的数据, 为消息队列
reactor_t *reactor; // 工作线程的 reactor
pthread_mutex_t lock;
void (*read_ready)(void *context);
void (*write_ready)(void *context);
};
}
object->reactor = reactor;
object->fd = fd;
object->context = context; //消息队列
object->read_ready = read_ready; //internal_dequeue_ready
object->write_ready = write_ready;
pthread_mutex_init(&object->lock, NULL);
struct epoll_event event;
memset(&event, 0, sizeof(event));
if (read_ready)
event.events |= (EPOLLIN | EPOLLRDHUP);
if (write_ready)
event.events |= EPOLLOUT;
event.data.ptr = object;
// 监听消息队列的 dequeue_sem 的可读写消息
if (epoll_ctl(reactor->epoll_fd, EPOLL_CTL_ADD, fd, &event) == -1) {
LOG_ERROR(LOG_TAG, "%s unable to register fd %d to epoll set: %s", __func__, fd, strerror(errno));
pthread_mutex_destroy(&object->lock);
osi_free(object);
return NULL;
}
return object;
}
工作线程中的实际一直保持运行的部分为 run_reactor , 其中第2个参数为0, 代表死循环一直保持监听, 在 bluedroid 中有提供 reactor_run_once 其调用参数为1,但没有看到有调用这个函数的地方
static reactor_status_t run_reactor(reactor_t *reactor, int iterations) {
// reactor 中保存当前线程句柄及运行状态
reactor->run_thread = pthread_self();
reactor->is_running = true;
struct epoll_event events[MAX_EVENTS];
//传进来的 iterations 为0 , 所以此处为死循环
for (int i = 0; iterations == 0 || i < iterations; ++i) {
pthread_mutex_lock(&reactor->list_lock);
list_clear(reactor->invalidation_list);
pthread_mutex_unlock(&reactor->list_lock);
int ret;
do {
// 开始监听 reactor->epoll_fd 集合中的 I/O 事件, -1 代表阻塞
ret = epoll_wait(reactor->epoll_fd, events, MAX_EVENTS, -1);
} while (ret == -1 && errno == EINTR);
if (ret == -1) {
reactor->is_running = false;
return REACTOR_STATUS_ERROR;
}
for (int j = 0; j < ret; ++j) {
// 这里后面会用到, 会唯一监听一个数据指针为 NULL 的事件, 代表退出循环
if (events[j].data.ptr == NULL) {
eventfd_t value;
eventfd_read(reactor->event_fd, &value);
reactor->is_running = false;
return REACTOR_STATUS_STOP;
}
reactor_object_t *object = (reactor_object_t *)events[j].data.ptr;
......
reactor->object_removed = false;
/// 处理可读事件
if (events[j].events & (EPOLLIN | EPOLLHUP | EPOLLRDHUP | EPOLLERR) && object->read_ready)
object->read_ready(object->context);
//处理可写事件
if (!reactor->object_removed && events[j].events & EPOLLOUT && object->write_ready)
object->write_ready(object->context);
pthread_mutex_unlock(&object->lock);
if (reactor->object_removed) {
pthread_mutex_destroy(&object->lock);
osi_free(object);
}
}
}
reactor->is_running = false;
return REACTOR_STATUS_DONE;
}
先来看向工作线程自己的消息队列发送消息
thread_post(bt_workqueue_thread, btu_task_start_up, NULL);
bool thread_post(thread_t *thread, thread_fn func, void *context) {
//将数据填充到 item
work_item_t *item = (work_item_t *)osi_malloc(sizeof(work_item_t));
item->func = func;
item->context = context;
//看第一个参数, 此处为工作线程 thread 中的work_queue
fixed_queue_enqueue(thread->work_queue, item);
return true;
}
void fixed_queue_enqueue(fixed_queue_t *queue, void *data) {
semaphore_wait(queue->enqueue_sem);
pthread_mutex_lock(&queue->lock);
list_append(queue->list, data);
pthread_mutex_unlock(&queue->lock);
//通知该消息队列已经可读了
semaphore_post(queue->dequeue_sem);
}
再来看其处理函数为默认设置的 work_queue_read_cb
static void work_queue_read_cb(void *context) {
fixed_queue_t *queue = (fixed_queue_t *)context;
work_item_t *item = fixed_queue_dequeue(queue);
item->func(item->context);
osi_free(item);
}
所以最后是用传来的消息体中的 func 来处理, 也就是 thread_post 的后面两个参数,一个是函数,一个是传入参数
在来看一下工作线程中绑定对应的消息队列
btu_bta_msg_queue = fixed_queue_new(SIZE_MAX);
fixed_queue_register_dequeue(btu_bta_msg_queue,
thread_get_reactor(bt_workqueue_thread),
btu_bta_msg_ready,
NULL);
/* queue 消息队列
* reactor 处理该消息队列的工作线程的reactor
* ready_cb read
* context 意义不明,bluedroid 中调用全部为 NULL
*/
void fixed_queue_register_dequeue(fixed_queue_t *queue, reactor_t *reactor, fixed_queue_cb ready_cb, void *context) {
// 保证一个消息队列中 register 一次
fixed_queue_unregister_dequeue(queue);
//queue 为前面的 btu_bta_msg_queue 消息队列
queue->dequeue_ready = ready_cb;
queue->dequeue_context = context;
queue->dequeue_object = reactor_register(
reactor, //工作线程的 reactor
fixed_queue_get_dequeue_fd(queue), //获取消息队列的 dequeue_sem
queue,
internal_dequeue_ready,
NULL
);
}
可以看到这里只注册了 read_ready : internal_dequeue_ready
static void internal_dequeue_ready(void *context) {
fixed_queue_t *queue = context;
queue->dequeue_ready(queue, queue->dequeue_context);
}
而这里 queue->dequeue_ready 就是 fixed_queue_register_dequeue 的第三个参数, 而 queue->dequeue_context 则一般为NULL
向注册好的消息队列发消息, 示例 :
void bta_sys_sendmsg(void *p_msg)
{
if (btu_bta_msg_queue)
//第一个参数为已注册的消息队列,代表消息是添加到该队列中
fixed_queue_enqueue(btu_bta_msg_queue, p_msg);
}