1. Alarm in Bluedroid
bluedroid 中采用了 POSIX 定时器, 其主要函数有3个
/* 创建定时器
* clock_id :基于哪一种时钟,取值为 CLOCK_REALTIME ,CLOCK_MONOTONIC 等等
* evp :包含定时到期时的信号内型及 callback 函数指针等
* timerid :将指向创建好的定时器ID
*/
int timer_create(clockid_t clock_id, struct sigevent *evp, timer_t *timerid)
/* 负责启动或停止timer_create创建的定时器
* timerid : 上面获取到的定时器ID
* flags : 说明定时器使用的是相对时间还是绝对时间
* value : 设置timerid指定的定时器时间, 其中 it_interval 为周期的时间
*/
int timer_settime(timer_t timerid, int flags, const struct itimerspec *value, struct itimerspect *ovalue);
// 删除一个定时器:
int timer_delete (timer_t timerid);
bluedroid 中定时器相关的函数都在 alarm.c 中实现, 下面根据 alarm.h 中申明的几个函数来看是怎样使用的。
alarm_new
在使用时首先创建 alarm ,
// 创建一个 one-time off alarm
alarm_t *alarm_new(const char *name) {
return alarm_new_internal(name, false);
}
// 创建一个 periodic alarm
alarm_t *alarm_new_periodic(const char *name) {
return alarm_new_internal(name, true);
}
static alarm_t *alarm_new_internal(const char *name, bool is_periodic) {
// alarms 不存在时调用 lazy_initialize 来初始化
if (!alarms && !lazy_initialize()) {
assert(false); // if initialization failed, we should not continue
return NULL;
}
...... //稍后在来追下面的内容
}
先来看 lazy_initialize ,回头在来看 alarm_new_internal 后面的处理
static bool lazy_initialize(void) {
bool timer_initialized = false;
bool wakeup_timer_initialized = false;
//创建一个 list_t ,由alarms 指向他
alarms = list_new(NULL);
// 创建 timer 定时器
if (!timer_create_internal(CLOCK_ID, &timer))
===> static bool timer_create_internal(const clockid_t clock_id, timer_t *timer) {
struct sigevent sigevent;
sigevent.sigev_notify = SIGEV_THREAD;
// 处理函数都是 timer_callback
sigevent.sigev_notify_function = (void (*)(union sigval))timer_callback;
if (timer_create(clock_id, &sigevent, timer) == -1) {
......
return false;
}
return true;
}
goto error;
timer_initialized = true;
// 创建 wakeup_timer 定时器
if (!timer_create_internal(CLOCK_ID_ALARM, &wakeup_timer))
goto error;
wakeup_timer_initialized = true;
alarm_expired = semaphore_new(0);
// 创建工作线程 default_callback_thread
default_callback_thread = thread_new_sized("alarm_default_callbacks",
SIZE_MAX);
// 设定高优先级 (-19)
thread_set_priority(default_callback_thread, CALLBACK_THREAD_PRIORITY_HIGH);
/* 创建消息对立 default_callback_queue ,将其由default_callback_thread 来处理
alarm_register_processing_queue 中设定最后的处理函数为 alarm_register_processing_queue */
default_callback_queue = fixed_queue_new(SIZE_MAX);
alarm_register_processing_queue(default_callback_queue,
default_callback_thread);
dispatcher_thread_active = true;
dispatcher_thread = thread_new("alarm_dispatcher");
thread_set_priority(dispatcher_thread, CALLBACK_THREAD_PRIORITY_HIGH);
// 关键函数,运行 callback_dispatch , 处理定时器到期
thread_post(dispatcher_thread, callback_dispatch, NULL);
return true;
...... // error 处理
}
这里创建了一个 list_t 指针alarms , 两个定时器 timer 和 wakeup_timer , 另外创建了两个工作线程 default_callback_thread 和 dispatcher_thread 。 其中 dispatcher_thread 运行 callback_dispatch , 功能是定时器到期的处理,后面再来看他的代码。
再来继续看 alarm_new_internal
static alarm_t *alarm_new_internal(const char *name, bool is_periodic) {
if (!alarms && !lazy_initialize()) {
assert(false); // if initialization failed, we should not continue
return NULL;
}
pthread_mutexattr_t attr;
pthread_mutexattr_init(&attr);
alarm_t *ret = osi_calloc(sizeof(alarm_t));
// Make this a recursive mutex to make it safe to call |alarm_cancel| from
// within the callback function of the alarm.
int error = pthread_mutexattr_settype(&attr, PTHREAD_MUTEX_RECURSIVE);
error = pthread_mutex_init(&ret->callback_lock, &attr);
// alarm_new 这里为 false , alarm_new_periodic 这里为 true
ret->is_periodic = is_periodic;
// 保存新创建的 alarm_t 中 stats->name
alarm_stats_t *stats = &ret->stats;
stats->name = osi_strdup(name);
// NOTE: The stats were reset by osi_calloc() above
pthread_mutexattr_destroy(&attr);
return ret;
}
alarm_set
接下来设定并启动定时器 , 其中 alarm 为上面新建的 alarm_t 结构体
void alarm_set(alarm_t *alarm, period_ms_t interval_ms,
alarm_callback_t cb, void *data) {
alarm_set_on_queue(alarm, interval_ms, cb, data, default_callback_queue);
}
void alarm_set_on_queue(alarm_t *alarm, period_ms_t interval_ms,
alarm_callback_t cb, void *data,
fixed_queue_t *queue) {
assert(queue != NULL);
alarm_set_internal(alarm, interval_ms, cb, data, queue);
}
static void alarm_set_internal(alarm_t *alarm, period_ms_t period,
alarm_callback_t cb, void *data,
fixed_queue_t *queue) {
pthread_mutex_lock(&monitor);
// 初始化 alarm 中的其他变量
alarm->creation_time = now();
alarm->period = period;
alarm->queue = queue;
alarm->callback = cb;
alarm->data = data;
schedule_next_instance(alarm);
alarm->stats.scheduled_count++;
pthread_mutex_unlock(&monitor);
}
关键函数 schedule_next_instance :
static void schedule_next_instance(alarm_t *alarm) {
/* alarms 根据deadline 的时间排序(earliest deadline first)
如果该 alarm 就是当前 alarms list 的第一个节点则需要 re-schedule */
bool needs_reschedule = (!list_is_empty(alarms) && list_front(alarms) == alarm);
if (alarm->callback)
remove_pending_alarm(alarm);
// 计算这个 alarm 的下一个触发时间点 deadline
period_ms_t just_now = now();
period_ms_t ms_into_period = 0;
if ((alarm->is_periodic) && (alarm->period != 0))
ms_into_period = ((just_now - alarm->creation_time) % alarm->period);
alarm->deadline = just_now + (alarm->period - ms_into_period);
// 根据 deadline 将alarm 插入 alarms 链表
if (list_is_empty(alarms) ||
((alarm_t *)list_front(alarms))->deadline > alarm->deadline) {
list_prepend(alarms, alarm);
} else {
for (list_node_t *node = list_begin(alarms); node != list_end(alarms); node = list_next(node)) {
list_node_t *next = list_next(node);
if (next == list_end(alarms) || ((alarm_t *)list_node(next))->deadline > alarm->deadline) {
list_insert_after(alarms, node, alarm);
break;
}
}
}
// 重新设置定时器
if (needs_reschedule ||
(!list_is_empty(alarms) && list_front(alarms) == alarm)) {
reschedule_root_alarm();
}
}
static void reschedule_root_alarm(void) {
const bool timer_was_set = timer_set;
// If used in a zeroed state, disarms the timer.
struct itimerspec timer_time;
memset(&timer_time, 0, sizeof(timer_time));
const alarm_t *next = list_front(alarms);
const int64_t next_expiration = next->deadline - now();
// 如果距离最近的触发时间小于 3s 需先申请 wakelock
if (next_expiration < TIMER_INTERVAL_FOR_WAKELOCK_IN_MS) {
if (!timer_set) {
if (!wakelock_acquire()) {
LOG_ERROR(LOG_TAG, "%s unable to acquire wake lock", __func__);
goto done;
}
}
timer_time.it_value.tv_sec = (next->deadline / 1000);
timer_time.it_value.tv_nsec = (next->deadline % 1000) * 1000000LL;
struct itimerspec end_of_time;
memset(&end_of_time, 0, sizeof(end_of_time));
end_of_time.it_value.tv_sec = (time_t)(1LL << (sizeof(time_t) * 8 - 2));
timer_settime(wakeup_timer, TIMER_ABSTIME, &end_of_time, NULL);
} else { //当触发时间大于 3s
struct itimerspec wakeup_time;
memset(&wakeup_time, 0, sizeof(wakeup_time));
wakeup_time.it_value.tv_sec = (next->deadline / 1000);
wakeup_time.it_value.tv_nsec = (next->deadline % 1000) * 1000000LL;
// 设定 wakeup_timer 的触发时间
if (timer_settime(wakeup_timer, TIMER_ABSTIME, &wakeup_time, NULL) == -1)
LOG_ERROR(LOG_TAG, "%s unable to set wakeup timer: %s",
__func__, strerror(errno));
}
done:
// 不需要申请 wakelock
timer_set = timer_time.it_value.tv_sec != 0 || timer_time.it_value.tv_nsec != 0;
if (timer_was_set && !timer_set) {
wakelock_release();
}
// 设定 timer 的超时时间
if (timer_settime(timer, TIMER_ABSTIME, &timer_time, NULL) == -1)
LOG_ERROR(LOG_TAG, "%s unable to set timer: %s", __func__, strerror(errno));
if (timer_set) {
struct itimerspec time_to_expire;
timer_gettime(timer, &time_to_expire);
if (time_to_expire.it_value.tv_sec == 0 &&
time_to_expire.it_value.tv_nsec == 0) {
LOG_DEBUG(LOG_TAG, "%s alarm expiration too close for posix timers, switching to guns", __func__);
semaphore_post(alarm_expired);
}
}
}
总结: 将 alarm_new 创建的 alarm_t 结构体按照 deadline 的先后加入到 alarms 链表, 如果该结构体的时间需要最先触发,则重新设定定时器, 这里有一个判断, 当触发时间小于3s 时直接设定到 wakeup_timer , 否这设定到 timer .
如果触发时间是在 alarms 的最前面, 则已经设定好了wakeup_timer 或者 timer, 他们的处理函数都是 timer_callback
static void timer_callback(UNUSED_ATTR void *ptr) {
semaphore_post(alarm_expired);
}
接下来需要看 alarm_expired 的处理, 也正是 timer 到期真正处理的位置
callback_dispatch
static void callback_dispatch(UNUSED_ATTR void *context) {
while (true) {
// 等待alarm_expired 的可读事件,效果同信号量
semaphore_wait(alarm_expired);
pthread_mutex_lock(&monitor);
alarm_t *alarm;
// 当 alarms 的最近 deadline 还没到时重新设定定时器
if (list_is_empty(alarms) ||
(alarm = list_front(alarms))->deadline > now()) {
reschedule_root_alarm();
pthread_mutex_unlock(&monitor);
continue;
}
// 最近的 deadline 已到期,移除
list_remove(alarms, alarm);
// 如果是周期定时器则重新计算 deadline 并插入 alarms ,其stats.rescheduled_count 加1
if (alarm->is_periodic) {
alarm->prev_deadline = alarm->deadline;
schedule_next_instance(alarm);
alarm->stats.rescheduled_count++;
}
// 重新根据alarms 首结点设置定时器
reschedule_root_alarm();
// 处理 alarm 到期,其中调用 alarm 中的 callback 函数
fixed_queue_enqueue(alarm->queue, alarm);
pthread_mutex_unlock(&monitor);
}
到此 bluedroid 中的 alarm 分析基本结束。 总结起来流程比较简单 : 每个定时设置以 alarm_t 结构体的形式存在, alarms 中会根据触发时间的顺序保存这些结构体, 此外会在定时器中设定alarms 首结点 (最先触发)的时间, 到期之后由 dispatcher_thread 取出首结点处理,下一个结点变为首结点,重新设置定时器。
2. A2DP Play
Android framework 定义了两个 hardware interfaces 用来操作audio output devices : audio_hw_device_t 和 audio_stream_out_t 。
AudioFlinger 是这些 interfaces 的唯一使用者 。Bluedroid在 system/bt/audio_a2dp_hw/audio_a2dp_hw.c 实现了这两个interface 。
static struct hw_module_methods_t hal_module_methods = {
.open = adev_open,
};
static int adev_open(const hw_module_t* module, const char* name,
hw_device_t** device)
{
struct a2dp_audio_device *adev;
adev = calloc(1, sizeof(struct a2dp_audio_device));
adev->device.common.tag = HARDWARE_DEVICE_TAG;
adev->device.common.version = AUDIO_DEVICE_API_VERSION_2_0;
adev->device.common.module = (struct hw_module_t *) module;
adev->device.common.close = adev_close;
adev->device.init_check = adev_init_check;
adev->device.set_voice_volume = adev_set_voice_volume;
adev->device.set_master_volume = adev_set_master_volume;
adev->device.set_mode = adev_set_mode;
adev->device.set_mic_mute = adev_set_mic_mute;
adev->device.get_mic_mute = adev_get_mic_mute;
adev->device.set_parameters = adev_set_parameters;
adev->device.get_parameters = adev_get_parameters;
adev->device.get_input_buffer_size = adev_get_input_buffer_size;
adev->device.open_output_stream = adev_open_output_stream;
adev->device.close_output_stream = adev_close_output_stream;
adev->device.open_input_stream = adev_open_input_stream;
adev->device.close_input_stream = adev_close_input_stream;
adev->device.dump = adev_dump;
adev->output = NULL;
*device = &adev->device.common;
return 0;
}
static int adev_open_output_stream(struct audio_hw_device *dev,
audio_io_handle_t handle,
audio_devices_t devices,
audio_output_flags_t flags,
struct audio_config *config,
struct audio_stream_out **stream_out,
const char *address __unused)
{
struct a2dp_stream_out *out;
out = (struct a2dp_stream_out *)calloc(1, sizeof(struct a2dp_stream_out));
out->stream.common.get_sample_rate = out_get_sample_rate;
out->stream.common.set_sample_rate = out_set_sample_rate;
out->stream.common.get_buffer_size = out_get_buffer_size;
out->stream.common.get_channels = out_get_channels;
out->stream.common.get_format = out_get_format;
out->stream.common.set_format = out_set_format;
out->stream.common.standby = out_standby;
out->stream.common.dump = out_dump;
out->stream.common.set_parameters = out_set_parameters;
out->stream.common.get_parameters = out_get_parameters;
out->stream.common.add_audio_effect = out_add_audio_effect;
out->stream.common.remove_audio_effect = out_remove_audio_effect;
out->stream.get_latency = out_get_latency;
out->stream.set_volume = out_set_volume;
out->stream.write = out_write;
out->stream.get_render_position = out_get_render_position;
/* initialize a2dp specifics */
a2dp_stream_common_init(&out->common);
out->common.cfg.channel_flags = AUDIO_STREAM_DEFAULT_CHANNEL_FLAG;
out->common.cfg.format = AUDIO_STREAM_DEFAULT_FORMAT;
out->common.cfg.rate = AUDIO_STREAM_DEFAULT_RATE;
......
*stream_out = &out->stream;
}
当 A2DP 连接好之后, A2dpStateMachine 发送 broadcast 通知 A2DP 状态变化, audio 会收到该通知之后首先调用 open_output_stream 接口, 其中会连接 bluedroid 的 ctrl socket :
static int adev_open_output_stream(struct audio_hw_device *dev,
audio_io_handle_t handle,
audio_devices_t devices,
audio_output_flags_t flags,
struct audio_config *config,
struct audio_stream_out **stream_out,
const char *address __unused)
{
// 如上, 初始化 audio_stream_out_t 接口
......
// 初始化 out->common , 其中 state 初始状态为 AUDIO_A2DP_STATE_STOPPED
a2dp_stream_common_init(&out->common);
/* 连接 bluedroid ctrl socket , 在连接之后发送 A2DP_CTRL_CMD_CHECK_READY ,
bluedroid 做出相应检查并确定 state 为 opened 时返回 SUCCESS ACK,ctrl fd 将保存在out->common中 */
a2dp_open_ctrl_path(&out->common);
if (a2dp_command(&out->common, A2DP_CTRL_CMD_OFFLOAD_NOT_SUPPORTED) == 0) {
DEBUG("Streaming mode set successfully");
}
/* 为保证在连接上之后立刻播放时耳机处于正确的状态需要 delay */
usleep(250000);
return 0;
}
先来看一下 a2dp_open_ctrl_path 的参数 &out->common :
out = (struct a2dp_stream_out *)calloc(1, sizeof(struct a2dp_stream_out));
struct a2dp_stream_out {
struct audio_stream_out stream;
struct a2dp_stream_common common; //保存a2dp相关状态及与bluedroid连接fd
uint64_t frames_presented; // frames written, never reset
uint64_t frames_rendered; // frames written, reset on standby
};
struct a2dp_stream_common {
pthread_mutex_t lock;
int ctrl_fd; //连接bluedroid ctrl fd
int audio_fd; //连接bluedroid data fd
size_t buffer_sz;
struct a2dp_config cfg;
a2dp_state_t state; //a2dp 状态
uint8_t codec_cfg[MAX_CODEC_CFG_SIZE];
};
其中 a2dp_state_t 包含以下几种状态
typedef enum {
AUDIO_A2DP_STATE_STARTING,
AUDIO_A2DP_STATE_STARTED,
AUDIO_A2DP_STATE_STOPPING,
AUDIO_A2DP_STATE_STOPPED,
AUDIO_A2DP_STATE_SUSPENDED, /* need explicit set param call to resume (suspend=false) */
AUDIO_A2DP_STATE_STANDBY /* allows write to autoresume */
} a2dp_state_t;
下面来看开始播放音乐的流程 , 在开始播放时 audio 直接调用 audio_stream_out_t 的 write 接口 :
static ssize_t out_write(struct audio_stream_out *stream, const void* buffer,
size_t bytes)
{
struct a2dp_stream_out *out = (struct a2dp_stream_out *)stream;
int sent = -1;
#ifdef BT_AUDIO_SYSTRACE_LOG
char trace_buf[512];
#endif
DEBUG("write %zu bytes (fd %d)", bytes, out->common.audio_fd);
pthread_mutex_lock(&out->common.lock);
/* only allow autostarting if we are in stopped or standby */
if ((out->common.state == AUDIO_A2DP_STATE_STOPPED) ||
(out->common.state == AUDIO_A2DP_STATE_STANDBY))
{
if (start_audio_datapath(&out->common) < 0)
{
goto finish;
}
}
当前状态为 AUDIO_A2DP_STATE_STOPPED , 所以会先连接 bluedroid data socket :
static int start_audio_datapath(struct a2dp_stream_common *common)
{
INFO("state %d", common->state);
#ifdef BT_AUDIO_SYSTRACE_LOG
char trace_buf[512];
#endif
INFO("state %s", dump_a2dp_hal_state(common->state));
int oldstate = common->state;
common->state = AUDIO_A2DP_STATE_STARTING;
// 通过 ctrl socket 发送 A2DP_CTRL_CMD_START 并等待 ACK
int a2dp_status = a2dp_command(common, A2DP_CTRL_CMD_START);
if (a2dp_status < 0)
{
ERROR("Audiopath start failed (status %d)", a2dp_status);
goto error;
}
else if (a2dp_status == A2DP_CTRL_ACK_INCALL_FAILURE)
{
ERROR("Audiopath start failed - in call, move to suspended");
goto error;
}
/* 连接 data socket */
if (common->audio_fd == AUDIO_SKT_DISCONNECTED)
{
common->audio_fd = skt_connect(A2DP_DATA_PATH, common->buffer_sz);
common->state = AUDIO_A2DP_STATE_STARTED;
}
return 0;
}
A2DP_CTRL_CMD_START
先来看 bluedroid 收到 A2DP_CTRL_CMD_START 之后的处理
static void btif_recv_ctrl_data(void)
{
case A2DP_CTRL_CMD_START:
/* 在 HFP 电话过程时,不会 start stream .
Some headsets like the Sony MW600, don't allow AVDTP START
in call and respond BAD_STATE. */
if (!btif_hf_is_call_idle())
{
a2dp_cmd_acknowledge(A2DP_CTRL_ACK_INCALL_FAILURE);
break;
}
// 检查当前 state 为opened ,且 flag 不为 remote suspend 等等
if (btif_av_stream_ready() == TRUE)
{
/* 创建 data socket 并监听 */
UIPC_Open(UIPC_CH_ID_AV_AUDIO, btif_a2dp_data_cb);
/* post start event and wait for audio path to open */
btif_dispatch_sm_event(BTIF_AV_START_STREAM_REQ_EVT, NULL, 0);
}
// 状态为 started , 同时检查 flag
else if (btif_av_stream_started_ready())
{
/* 只需创建 data socket */
UIPC_Open(UIPC_CH_ID_AV_AUDIO, btif_a2dp_data_cb);
a2dp_cmd_acknowledge(A2DP_CTRL_ACK_SUCCESS);
}
else
{
APPL_TRACE_WARNING("%s: A2DP command %s while AV stream is not ready",
__func__, dump_a2dp_ctrl_event(cmd));
a2dp_cmd_acknowledge(A2DP_CTRL_ACK_FAILURE);
break;
}
break;
这里 BTIF_AV_START_STREAM_REQ_EVT 最后会交给 opened 或者 started 的 handler 来处理 ,主要来看一下 opened 状态下的处理 :
static BOOLEAN btif_av_state_opened_handler(btif_sm_event_t event, void *p_data, int index)
{
case BTIF_AV_START_STREAM_REQ_EVT:
if (btif_av_cb.peer_sep != AVDT_TSEP_SRC)
btif_a2dp_setup_codec();
BTA_AvStart();
btif_av_cb.flags |= BTIF_AV_FLAG_PENDING_START;
break;
下面的流程基本和 A2DP 之前发送 command 一样 :
static const UINT8 bta_av_sst_open[][BTA_AV_NUM_COLS] =
{
/* AP_START_EVT */ {BTA_AV_DO_START, BTA_AV_SIGNORE, BTA_AV_OPEN_SST },
发送 STREAM START 的 command 给 headset , 状态仍处于 open . 在收到 headset 相应 SUCCESS 的消息之后
07-09 10:38:29.222 5024 11912 D bt-btif : bta_av_stream0_cback avdt_handle: 2 event=0x5 07-09 10:38:29.227 5024 11912 D bt-btif : AV Sevent(0x41)=0x121c(STR_START_OK) state=3(OPEN) 07-09 10:38:29.227 5024 11912 D bt-btif : bta_av_start_ok wait:x0, role:x10
这里 event 5 就是start stream 的 comfirm :
void bta_av_start_ok (tBTA_AV_SCB *p_scb, tBTA_AV_DATA *p_data)
{
......
(*bta_av_cb.p_cback)(BTA_AV_START_EVT, (tBTA_AV *) &start);
最后会回到 btif av opened 的 handler 来处理:
static BOOLEAN btif_av_state_opened_handler(btif_sm_event_t event, void *p_data)
{
case BTA_AV_START_EVT:
{
if (btif_av_cb.flags & BTIF_AV_FLAG_PENDING_START) {
if (btif_av_cb.peer_sep == AVDT_TSEP_SNK)
//给 audio 发送 success ack
btif_a2dp_on_started(NULL, TRUE);
}
//sm handler切换到 started,
btif_sm_change_state(btif_av_cb.sm_handle, BTIF_AV_STATE_STARTED);
} break;
状态机在切换到 started 之后会通知 A2dpStateMachine 状态 BTAV_AUDIO_STATE_STARTED , 上层切换 audio 状态为 playing .
A2DP_DATA_PATH
headset 回复 start stream success 之后, bluedroid 回复 success ack 给audio , 接下来 audio 开始连接 data socket . bluedroid 中监听 data socket 的函数为 btif_a2dp_data_cb , 当连接建立时会传入 UIPC_OPEN_EVT
static void btif_a2dp_data_cb(tUIPC_CH_ID ch_id, tUIPC_EVENT event)
{
case UIPC_OPEN_EVT:
/* read directly from media task from here on (keep callback for
connection events */
UIPC_Ioctl(UIPC_CH_ID_AV_AUDIO, UIPC_REG_REMOVE_ACTIVE_READSET, NULL);
UIPC_Ioctl(UIPC_CH_ID_AV_AUDIO, UIPC_SET_READ_POLL_TMO,
(void *)A2DP_DATA_READ_POLL_MS);
if (btif_media_cb.peer_sep == AVDT_TSEP_SNK) {
/* 初始化 encoder */
btif_dispatch_sm_event(BTIF_AV_UPDATE_ENCODER_REQ_EVT, NULL, 0);
}
btif_media_cb.data_channel_open = TRUE;
break;
此时 btif av 状态机处于 started 状态 :
static BOOLEAN btif_av_state_started_handler(btif_sm_event_t event, void *p_data, int index)
{
case BTIF_AV_UPDATE_ENCODER_REQ_EVT:
btif_a2dp_update_codec();
break;
}
void btif_a2dp_update_codec(void)
{
APPL_TRACE_DEBUG("## A2DP UPDATE CODEC ##");
mutex_global_lock();
btif_media_task_start_aa_req();
btif_a2dp_encoder_update();
mutex_global_unlock();
}
btif_media_task_start_aa_req
BOOLEAN btif_media_task_start_aa_req(void)
{
BT_HDR *p_buf = osi_malloc(sizeof(BT_HDR));
p_buf->event = BTIF_MEDIA_START_AA_TX;
fixed_queue_enqueue(btif_media_cmd_msg_queue, p_buf);
return TRUE;
}
将消息放入 btif_media_cmd_msg_queue , 来看一下该消息队列的处理
static void btif_media_thread_handle_cmd(fixed_queue_t *queue, UNUSED_ATTR void *context)
{
switch (p_msg->event)
{
case BTIF_MEDIA_START_AA_TX:
btif_media_task_aa_start_tx();
break;
case BTIF_MEDIA_STOP_AA_TX:
btif_media_task_aa_stop_tx();
break;
}
}
static void btif_media_task_aa_start_tx(void)
{
APPL_TRACE_DEBUG("%s media_alarm %srunning, feeding mode %d", __func__,
alarm_is_scheduled(btif_media_cb.media_alarm)? "" : "not ",
btif_media_cb.feeding_mode);
last_frame_us = 0;
...... // reset some value
// 创建周期定时任务
btif_media_cb.media_alarm = alarm_new_periodic("btif.media_task");
// 开始 20ms 的定时器,处理函数是 btif_media_task_alarm_cb
alarm_set(btif_media_cb.media_alarm, BTIF_MEDIA_TIME_TICK,
btif_media_task_alarm_cb, NULL);
}
static void btif_media_task_alarm_cb(UNUSED_ATTR void *context) {
thread_post(worker_thread, btif_media_task_aa_handle_timer, NULL);
===> btif_media_send_aa_frame(timestamp_us); // 开始编码并发出data
}
回头继续来看 audio 中发送数据 out_write
static ssize_t out_write(struct audio_stream_out *stream, const void* buffer,
size_t bytes)
{
......
if ((out->common.state == AUDIO_A2DP_STATE_STOPPED) ||
(out->common.state == AUDIO_A2DP_STATE_STANDBY))
{
if (start_audio_datapath(&out->common) < 0)
{
goto finish;
}
}
// 连接 data socket 之后
pthread_mutex_unlock(&out->common.lock);
// 其中以间隔 20ms 发送
sent = skt_write(out->common.audio_fd, buffer, bytes);
pthread_mutex_lock(&out->common.lock);
finish: ;
......
return bytes;
}
bluedroid 中哪里会来从 data socket 读取这些数据呢 ? 直接搜索可以找到 btif_media_aa_read_feeding 会来读取, 而调用该函数的位置正是在 btif_media_send_aa_frame :
static void btif_media_send_aa_frame(uint64_t timestamp_us)
{
UINT8 nb_frame_2_send = 0;
UINT8 nb_iterations = 0;
// 从 data socket 中取出相应的数据
btif_get_num_aa_frame_iteration(&nb_iterations, &nb_frame_2_send);
==> btif_media_aa_prep_sbc_2_send
===> btif_media_aa_read_feeding(UIPC_CH_ID_AV_AUDIO)
====>
/* get the number of frame to send */
if (nb_frame_2_send != 0) {
for (UINT8 counter = 0; counter < nb_iterations; counter++)
{
/* 重新编码这些数据 */
btif_media_aa_prep_2_send(nb_frame_2_send, timestamp_us);
}
}
/* 发送*/
bta_av_ci_src_data_ready(BTA_AV_CHNL_AUDIO);
}
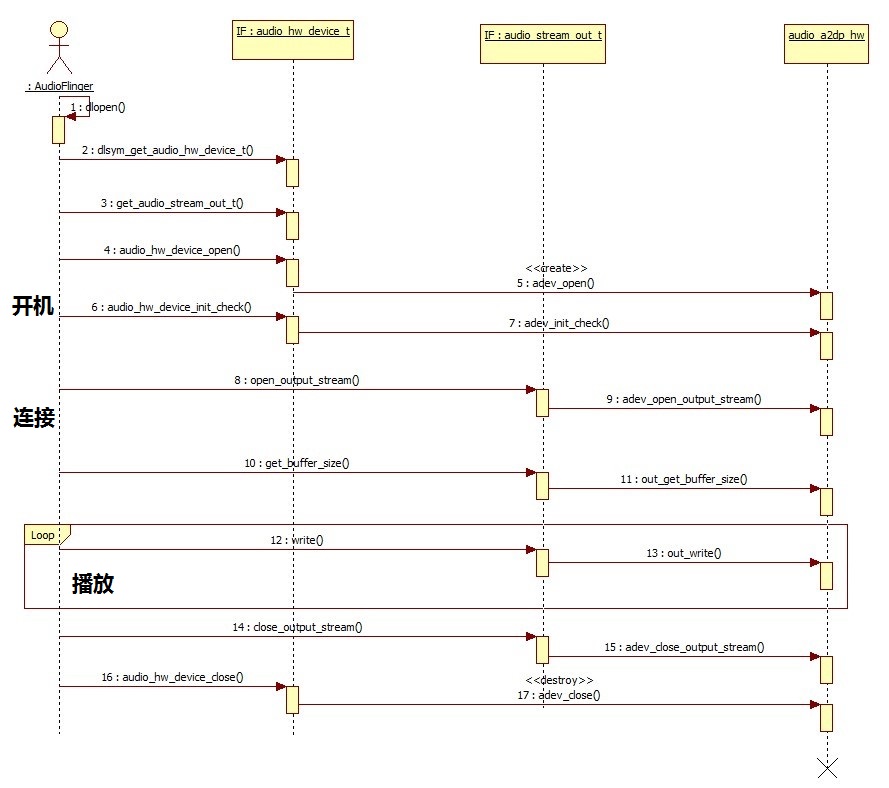
总结
关于 A2DP data 的处理这里不再继续追了, 到这里 A2DP data 发送的流程基本结束 。
下图简单体现 audio 和 bluedroid 在A2DP 上的相关调用关系 :